
ミニ特集「知能システム学の博士論文」Development of a 3D LiDAR Database and Knowledge-base for Improving Autonomous Driving Perception(自動運転の認識機能の改善のための3D LiDARデータベースおよび知識ベースの開発)(Jacob Lambert)
未来社会創造機構/知能システム学専攻教授 武田 一哉
自動運転技術は、交通事故の数を減らし、人間の生産性を向上させます。運転に必要な時間を無くしたり、そもそも移動が難しい人の生活を豊かにすること、また、効率的な移動の実現による環境の保護など、自動運転技術は社会を豊にします。自動運転技術は、商業科する準備がほぼ整っていると言われていますが、実際にはまだ解決されていない問題が多く存在します。現在の自動運転システムにおける難問の多くは、車両を取り巻く環境の理解に関する問題です。自動運転のための物体認識には、しばしばカラーカメラのような外部感覚センサーが使われます。物体認識アルゴリズムはこの画像から、安全な航行に必要な情報を抽出します。さらに、物体を時間とともに追跡し、衝突を避けるためにその未来の軌道を予測することも必要です。基本的に、安全な航行は外部世界の正確な理解に基づいています。
高解像度の画像を持つ現代のデジタルカメラは、センサーとして魅力的です。人間の目には明確で、解釈しやすいデータを生成します。しかし、自動運転やロボティクスへの応用では、カメラは大きな欠点を持っています。すなわち、情報は2Dの画像の形式であり、航行に必要な3次元的な情報(物体までの距離)を取得することは困難です。複数のカメラを使うことで距離を推定する方法には、キャリブレーション(2つのカメラ間の位置関係を正確に調整すること)が必要であり、調整誤差は性能に大きく影響します。また、夜間のように、照明が不十分な状況ではカメラは不適切である可能性があります。
カメラの代わりに、3D LiDARと呼ばれる3次元的に周囲を計測するセンサーが最近開発され、自動運転システムで使用されるようになりました。現代の3D LiDARデバイスは360度の水平視野を持っており、周辺物体の位置や形を1秒あたり数百万点で計測する(計測結果は「点群データ」と呼ばれます)ことで、高精度に物体認識を行うことができます。基本的には、一つのセンサーが車の上に取り付けられていれば、点群データを介して周囲の物体を監視することができます。3D LiDARは自動運転に適したセンサーですが、欠点もあります。画像と違って、物体の色情報が取得できないこと、遠くの物体に対応する点群の数が少なくなるため、遠くの物体の検出がより困難になります。
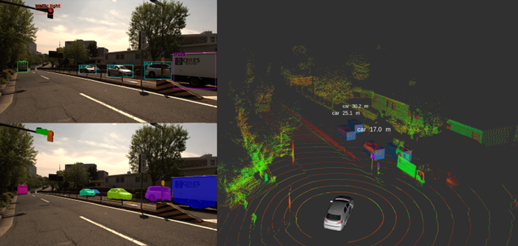
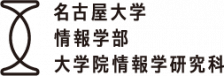
図1 LiDAR センターを用いた周辺物体の検出結果の例
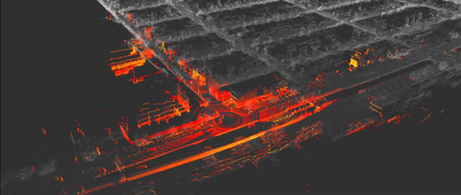
図2 LiDAR センサーの信号の統合による都市域の広域計測結果
3D LiDARは自動運転のための物体認識に有望ですが、画像認識の研究も進歩を続けています。このことから、3D LiDAR とカメラとを融合して活用する前提で、様々な3D LiDARがどの程度の性能を発揮するかを調べることが重要です。この論文の目的は、与えられた3D LiDARセンサーが、自動運転の物体検出にどの程度有効かを判断する標準的な方法を提案することです。すなわち、物体認識アルゴリズムが、与えられた3D LiDARセンターの計測限界を克服して安全な自動運転を提供できるかを評価する方法を提案します。
この研究は、3D LiDARを自動運転の物体認識に使用する利点も明確にします。すなわち、3D LiDARだけを使用した場合でも、多くの状況で自動運転に適した性能を達成することができることも示します。
3D LiDARデータの処理アルゴリズムとハードウェアを改善するために、この研究ではいくつかのオープンデータセットを作り提供します。まず、最小限の人間の労力で3D LiDARデータセットを作成する方法を開発し、それをテストし、大規模な歩行者追跡データセットを作成します。このデータセットは、物体検出アルゴリズムのテストに使用できます。この研究が提供するもう一つのデータセットは、複数の3D LiDARデータセットと200キロ以上の距離を走行して得られた走行中のデータが含まれています。このデータは、自動運転用に利用可能な3D LiDARハードウェアの多様性を比較する基礎として使用されます。一方で、種々の環境の下で3D LiDARの性能を比較するために、静止状態での計測データを組織的に収集するために、環境の変動要素の標準化も行いました。さらに、データセットには、雨、霧、強い光の影響を評価するための悪天候のLiDARデータが含まれています。全体として、このデータセットにより、LiDARのハードウェアとソフトウェアの両方の比較評価が可能になります。
研究成果であるデータとアルゴリズムの比較方法により、3D LiDARが、自動運転の物体認識に利用可能であるかの評価が可能になり、現在の制限を克服する新たなセンサーとその処理アルゴリズムの構築に大きく寄与します。
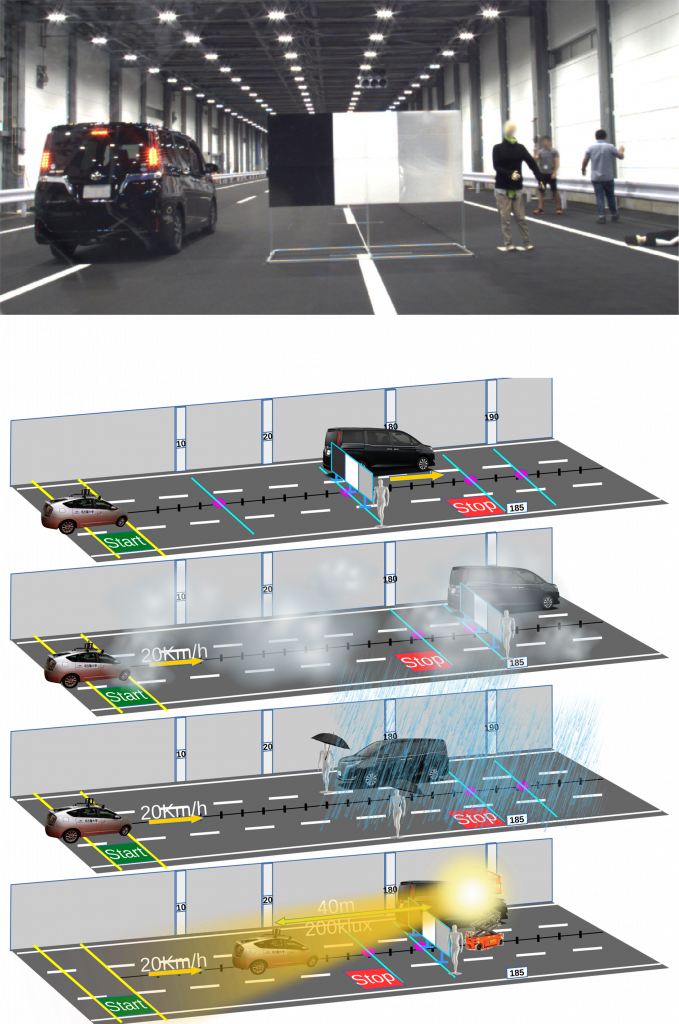
図3 IBRE Dataset:本研究ではLiDARセンサーの基本性能を明らかにするために多様な模擬
天候下での複数のセンサーの計測結果をデータベース化し公開しました。(上図はデータ収集の様子を、下図はデータを収集した環境条件(通常、霧、雨、逆光)を示す。)