
見る触覚センサ
はじめに
本稿では、「触覚の見える化」について解説したい。視覚と触覚はかけ離れていて、読者には見ることで触覚になるということは理解しづらいかと思う。また、触覚センサについてご存じない読者も大勢いるかと思う。まずは、皆さんになじみのあるロボットの話から始めることにする。
今から40年程前、当時の通産省工業技術院が進める極限作業ロボットという国の大型プロジェクト (大プロ) がスタートした。ちょうど日本ロボット学会が発足した頃である。この大プロでは、原子力発電所内で危険な作業を遂行するための原子力ロボット[1]、海洋プラットフォームでメンテナンス作業を遂行する海洋ロボット、火災を鎮火する防災ロボットといった三体のロボットを開発することを目指していた。
著者が所属していた民間企業は、その中で原子力ロボットを開発するグループに属していて私が就職したのはこの大プロ発足後5年が経過した頃であった。平成2年ごろ実施された原子力ロボットの実証機による実験風景を図1に示す。
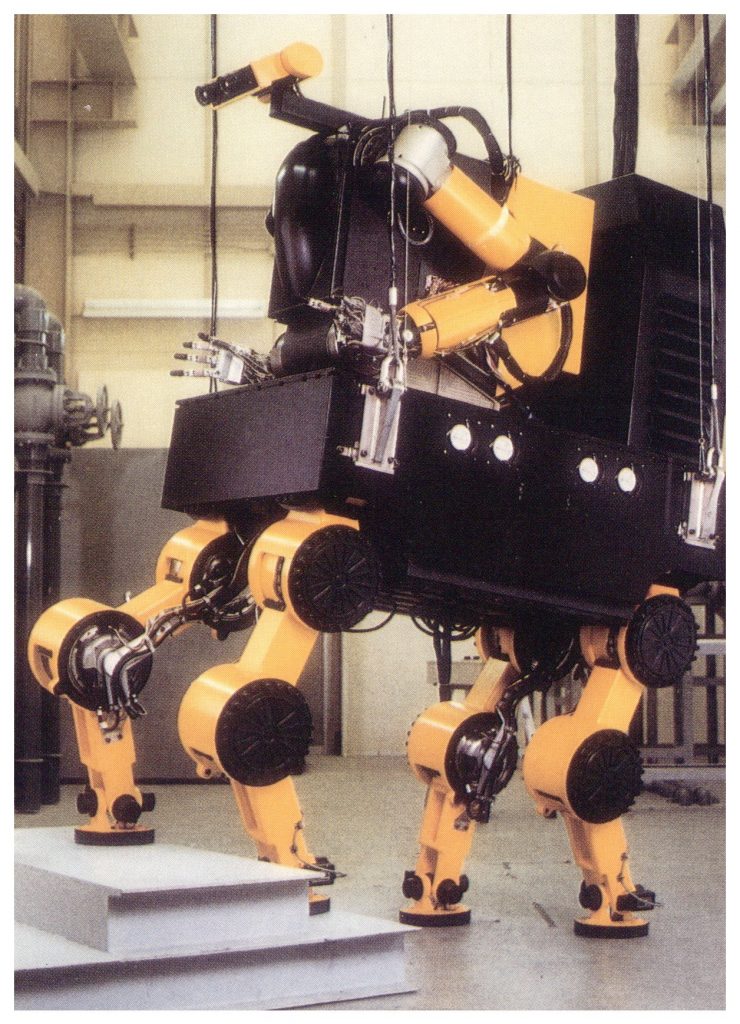
このロボットは、4本の脚機構と7自由度アーム・4本指ハンドを装備していて、原子力発電所内のオーバーブリッジの昇降(ちょうど図1がそのシーン)、建屋内のドアの開閉、各種バルブの分解組み立て、パッキンの交換などを可能としていた。とくにハンドについては、当時の米国で開発が進んでいたUtah/MITハンドやStanford/JPLハンドと比べても遜色がなかった。現代のヒューマノイドロボットと比べると歩きはぎこちないが、ナットをハンドでもってねじ込み、さらにスパナを持ってそれを固くめるなど巧みなハンドリングのスキルを持っていた。これらのスキルは、触覚の助けがないとやりづらい。このことは、分厚い手袋をすると細かい作業がしにくくなることからも想像でき、触覚の重要性が理解できる。
著者が当時所属していた民間企業では、その大プロの中で、従来の触覚センサを飛躍的に高度化する「三軸触覚センサの開発」というテーマを受諾していて、著者はその一部を担当させていただいていた。当時開発していた触覚センサは、半導体プロセスを使用した単結晶シリコンを構造材料とするセンサであった。このセンサは、シリコンウェハ上に半導体ひずみゲージを形成したものをロードセルに用いることを原理としている。2タイプの三軸触覚センサ[2]が開発され、それらの写真を図2と3に示す。 これらのセンサは、上面で発生する三軸力の分布を計測することが可能である。
著者がロボットのテーマに関わり始めたのはこれら三軸触覚センサからであり、そのころ触覚センサの研究者や企業はごく少数であった。本稿の主題の「見る触覚センサ」は、そのあとから開発したものである。以下では、当時を思い出しながら解説していくことにする。
三軸が持つ意味
ここで三軸について少し学問的な説明を加えてその重要性を示すことにする。連続体力学の基本原理の一つにCauchyの応力原理[3]というものがあって、接触力が物体表面の面素に作用すると、面素の物体側内部で応力テンソルが発生し面素の表面で発生する応力ベクトルと釣り合うとされている。したがって、接触によって生じる触覚情報を物理的に忠実に計測するには、センサ表面に発生する応力ベクトルの3成分を計測するか、内部で発生する対称な応力テンソルの6成分を計測するしかないことになる。
三軸触覚センサは前者の立場をとり、このセンサによればセンサに作用する垂直力だけでなく、滑り方向の力も検知可能となる。この能力により、例えばロボットがコップを持つとき、注がれた水の量に応じて発生する滑り方向の力を検出でき、滑り落とす前に把握力を上昇させるなどの動作をロボットに実行させることが可能となる。
なお、後者の立場をとるセンサも東京大学の篠田先生によって考案されており、テンソルセルと命名されている[4]。主方向が求まるなどほかのセンサでは得難い特性がある。名古屋で開催のICRA(International Conference on Robotics and Automation)で発表された当時、著者は大学に移ったばかりで、ずいぶん感心させられたことを記憶している。
単結晶シリコンを構造材料とするセンサの限界
私がいた民間企業では、前述の単結晶シリコンを構造材料とする三軸触覚センサを当初の計画通り完成することができた。単結晶シリコンを構造材料とすると、ひずみセンサ以外にもスイッチ、アンプ、温度センサや場合によるとマイクロコンピュータも搭載可能で、当時はやっていたインテリジェントセンサとなる。また、出力の線形性が抜群によいという利点もある。
しかし、著者が実際にこのセンサを使用してみて、いくつか満足できない点があった。まず、このセンサは単結晶シリコンで出来ているために、衝撃力に弱い点である。事実、実験途中で一度治具をセンサに当てて、ロードセルをあっけなく壊してしまったことがあった(図2で2ユニット分を一度に破壊してしまった)。また、センサの信号配線などから周囲の電気的ノイズを拾うことがあるようで、ノイズ対策に苦慮していた。また、このセンサを製作するためには、ICプロセスとマイクロマシニングを組み合わせた高度なプロセスが必要となるという問題があった。ICプロセス内でマイクロマシニングを実行するとチャンバーを汚してしまうので、専用の製造ラインが必要とされるため、当時ごく限られた研究機関でのみ上記の加工が可能であった。
著者が民間企業から大学移った時を期に、単結晶シリコンを構造材料とする触覚センサとは異なる原理の触覚センサを模索していた。そんな中、かつて工業技術院機械技術研究所の谷江研究室を訪問した時のことを思い出した。それが、触覚を画像化して計測する技術であり、次で述べる光導波形三軸触覚センサの原理となっている。次の章から「見る触覚センサ」のお話が始まる。
見る触覚の原理
前述の谷江研究室の訪問は、平成元年ごろだったと思う。そのとき、紹介されたのが光導波路型触覚センサ[5]である。
このセンサの着想には、御本人が英国に出張したとき病院で見た偏平足の計測器がヒントになっているとのことであった。その時の計測器とは別物であるかもしれないが、現在医療器具として販売されているものの模式図を図4に示す。この器具では、平行光が透明な板の端面から入射されている。透明な板の内部で、その光は全反射するので、通常は裏面から何も見えない。しかし、上面に物体が接触すると、接触面で全反射の条件が崩れて、散乱光が裏面からみることができる。図4にはこうして得られた偏平足の様子が示されている。
谷江氏は、以上の原理を利用して図5のような触覚センサを考案し、光導波路型触覚センサと命名した。この方式は光導波路に類似であるために、「光導波路型」を冠したのではないかと考えている。図5では、裏面に円錐形の突起を配列したゴムシートを設置して透明な板の上面に設置している。円錐形のゴム突起が頂点から接触すると押し付け力に比例して接触面積が増大するので、光の分布を計測すればゴムシート上面で生じた接触によって生じた圧力分布を計測することが可能となる。谷江氏は、そのときの光の分布を計測するためにフォト・トランジスタのアレイを使用していた。薄型化には、そのような方法が有利であるが、機械技術研究所の見学の後、著者は光の分布を画像として処理してはどうかとずっと考えていたのである。
著者が民間企業を退職する頃、携帯電話用途の画像センサが急速に小型化して広く使用されるようになってきていた。また、撮影中近くでモータなどの電磁機器が動作しても画像の乱れはそれほどないので、市販の画像センサでも電磁ノイズにある程度タフであることも魅力の一つであった。さらに、画像処理のソフトウェア技術はすでに頂点を極め、一般向けのライブラリーが提供されていたので、それらが利用可能であることも選定理由の一つであった。以上が画像センサを使おうと思った理由である。
光導波形三軸触覚センサの誕生
民間企業から大学に移った後、前述の谷江氏らが開発した光導波路型触覚センサを三軸触覚センサへと発展させる研究をスタートした。
谷江氏らのもので使用していたフォト・トランジスタアレイを画像センサに置き換え、さらに三軸力計測の機能を持たせるためにはゴムシートの設計を変更する必要があることはわかっていた。種々検討した結果、突起をゴムシートの裏面に設けるだけでなく表面にも設けることとした。これには、健康サンダルが参考になった。健康サンダルを履いて地面をけると、突起が斜めに傾くような感触がある。それなら、その傾きが計測できれば、せん断力が計測できるのではないかと考えた[6]。
開発の当初、図6に示すように表面の円柱状触子一個に対してその裏面に円すい触子の数を4つとする設計を採用した。これは、4つの領域の差演算により重心位置を求める4分割形PSD(Position Sensitive Detector)を参考にしたためである。この時点では、将来4分割形PSDのアレイが開発されれば、画像センサの代わりに谷江氏らのセンサのフォト・トランジスタアレイのように用いて薄型化を図ることも考えていた。
図6(a)に示すように、垂直力だけ印加される場合には4つの接触面積が均等になる。一方、せん断力も同時に受けるとき図6(b)のように4つの接触面積が均等ではなくなる。円柱状突起に作用するモーメントと不均等になった円すい突起の接触反力によるモーメントが釣り合うため、円柱突起先端に作用する三軸力と4つの接触面積の間の関係を導くことが可能となる。
より進んだ光導波形三軸触覚センサに向けて
最近では,よりせん断力の方向の同定精度を高めるために,8円すい触子形を採用している。また、取り扱いの容易さから、当初シート状にセンサ素子アレイを製造していたが、多指ハンドの指先端に設置する目的から、半球状に配列するために独立したセンサ素子を配列する方式をとっている[7]。図7に半球型の三軸触覚センサを示す。このセンサは41個のセンシング素子を備えており、それらは半球殻のアルミニューム合金ドームに明けられた41個の穴に挿入されている。このアルミニューム合金ドームにより、センサ素子間の相互干渉を除くことができるという効果も得られた。
前述の円柱触子―円すい触子形の最終形は、曲面に配置できセンサ素子間の干渉がないなど優れた特性を有しているが、素子の形状が比較的複雑であるために,小型化することが難しい。しかし,円すい触子の製造に限定すれば,放電加工やエッチングにより微細な円すい触子のアレイを製造できる。そこで、このことに着目して開発した触子移動形について解説する。図8に示すマイクロ三軸触覚センサでは,触子間の距離が600μmとなっている[8]。センサの構造としては,最初に述べた光導波形触覚センサの構造そのものを採用した。すなわち小型化を図るために可能な限り構造を単純化した。その代わり、画像処理のソフトウェア技術で補っている。本ソフトウェアでは、垂直力分布を求めるための輝度値と輝度分布の水平方向移動量を求めている。明るいスポットの追跡では、二値化、ラベリング、領域ごとの重心計算などの画像処理により行っていた。
その後,LIGA(Lithographie Galvanoformung Abformung)プロセスの採用により触子間距離を80μmまで接近させることに成功するとともに、画像処理の面でも対応点の追跡をオプティカルフローで求めるなど改良を継続して進めている[9]。
触覚情報の記録・再生
少子高齢化が急速に進む我が国において、匠の技の継承は大きな問題の一つである。匠の技を記録して、必要なとき再生する技術は今後求められてくると考えられる。また、記録された匠の技をロボットに再生できれば、ロボットの高度化にもつながる。現在「人工知能」に耳目が集められているが、ロボットに期待されているのは、それに加えて人間の手技を人工的に生起させる「人工技能」(この用語は、富士通の内山氏によって初めて提案された)であると思われる。
そのためのコア技術となる「触覚の記録・再生」システムは、図9に示すものとなると考えている[10]。このシステムには、2つのセンサが不可欠で、一方は前述の光導波形三軸触覚センサとなり、再生側で使用される。もう一方は、匠の技を記録するセンサとなり、ヒトの指先に装着されて匠の技を発揮しているときに匠が感じている触覚を記録するセンサである。
そこで、図10のような爪色三軸触覚センサを開発した。爪の色の変化は爪の下の血液分布の変化であることから、血液に吸収されやすい緑色光を照射し、三軸力と爪色の変化の関係は複雑であるために三軸力の同定に深層学習法を用いた。この爪色三軸触覚センサは、従来のものよりせん断力検出誤差をおよそ1/3に低下することに成功した。現在、先ほど述べた図9のシステムを完成すべく、研究を継続している。
触覚研究の魅力と将来
触覚センサについて現在様々な原理のものが提案されて、まさに百花繚乱という様相を呈している。マシンビジョン用カメラの撮像素子の原理が概ねCCD(Charge Coupled Device)かCMOS(Complementary Oxide Semiconductor)イメージ・センサに絞られているのに対して対照的である。提案原理が多いということは,それだけうまくいっていないともとれる。 1982年にHarmonが触覚センサについてサーベイを書いた[11]時点でもすでに何例かの触覚センサが提案されていたが、それからおよそ40年過ぎた現在においても、CCDやCMOSカメラのように決定版的な原理となるものは触覚センサにはない。
本稿からインスピレーションを受けた読者が新しく決定版となる原理を考え出すことも十分期待できる。触覚センサは物体との物理的接触を考えに入れて設計しないといけないところに他の電子デバイスとは異なる難しさがあるが、単純な電子デバイスとは異なる達成感もあるので、読者の方々にはぜひチャレンジいただきたい。
また、開発にあたって半導体製造プロセスを使用する原理を必要とする場合もあるが、比較的安価に手軽に研究室レベルで実行できる原理も数多くある。小さい初期投資で、シミュレーション、試作、実装実験、応用実験など各段階で論文として発表できる。したがって、大学関係者にとって触覚センサの研究は論文の生産性が大変高いテーマといえる。若い研究者がこの分野で今後多く挑戦されることを期待したい。
おわりに
触覚という感覚は、他の4感とは異なり感覚器の方を積極的に動かして情報を獲得している特徴を有している。手の器用さと大いに関係し、ロボットのスキルを向上するには欠くことのできない感覚である。
触覚研究の一つの出口として、著者らは「触覚の記録・再生」システムの実現を目指しているが、生の触覚データをそのまま記録するのではなく、図9に示したように複雑系科学専攻の鈴木泰博先生が考案された「触譜」[12]に変換することを考えている。
触譜とは、触覚の時系列情報と強弱を楽譜のように表したものである。鈴木先生は、強さと速度の積が一定となる調和的触譜によれば、「快適性」を生起することをすでに発見されている。触覚の生データを「見える化」するだけでなく、ヒトに与えられた触覚刺激により生起する感情を「見える化」するために、触譜が益々有効になると期待している。
最後に、著者が触覚研究を始めたころに比べると触覚研究の研究者は圧倒的に増えたように感じる。それだけ世の中がロボットにもヒトにも触覚が重要であることを認識してきたせいだと思う。しかし、触覚の計測はデバイスに依存しており、標準デバイスがない現在、研究者ごとに得られた知見が異なり、統一理論のようなものは存在していない。それだけに挑戦のしがいあるテーマであり、今後この分野の益々の発展を期待したい。
参考文献
- 極限作業ロボット技術研究組合編,極限作業ロボット(原子力ロボット)の研究開発、日本原子力学会誌,Vol. 34, No. 12 (1992), pp. 1108-1115.
- 小林光男・鷺沢忍、シリコンを構造材料とする3軸触覚センサ,電子情報通信学会論文誌 C-II, Vol. J74-C-II, No. 5 (1991), pp. 427-433.
- Y. C. Fung (大橋義夫, 村上澄男, 神谷紀生 訳),「個体の力学/理論」,培風館(1970),pp. 62-64.
- Shinoda, H., Morimoto, N. and Ando, S., Tactile sensing using tensor cell, 1995 IEEE International Conference on Robotics and Automation, (1995), pp.825-830.
- K. Tanie, K. Komoriya, M. Kaneko, S. Tachi and A. Fujiwara, A high resolution tactile sensor array, Robot Sensors Vol. 2: Tactile and Non-Vision, Kempston, UK: IFS (Pubs), (1986), pp. 189-198.
- M. Ohka, Y. Mitsuya, Y. Matsunaga and S. Takeuchi, Sensing characteristics of an optical three-axis tactile sensor under combined loading, Robotica, Vol. 22-2 (2004), pp. 213-221.
- M. Ohka, S.C. Abdullah, J. Wada and H.B. Yussof, Two-hand-arm Manipulation Based on Tri-axial Tactile Data, Vol. 4, Issue 1, (2012), pp.77-84.
- M. Ohka, Y. Mitsuya, I. Higashioka and H. Kabeshita, An Experimental Optical Three-axis Tactile Sensor for Micro-Robots, Robotica, Vol. 23-4 (2005), pp. 457-465.
- M. Ohka, T. Matsunaga, Y. Nojima, D. Noda and T. Hattori, Basic Experiments of Three-axis Tactile Sensor Using Optical Flow, 2012 IEEE International Conference on Robotics and Automation, pp. 1404-1409.
- M. Ohka, H. Komura, K. Watanabe and R. Nomura, Two Experimental Devices for Record and Playback of Tactile Data, 2021, 6(3), 54, 全13頁, https://doi.org/10.3390/philosophies6030054
- L. D. Harmon, Automated tactile sensing, Int. J. Robotic Res., Vol. 1, No. 2, (1982), pp. 3-32.
- 鈴木泰博,触譜とインフォモーション―インフォモーションのための,新しい触覚学, Tactileology の創成に向けて―,トライボロジスト,第63巻9号,(2018), pp. 593-598.
大岡 昌博(おおおか まさひろ)
・名古屋大学 大学院情報学研究科 複雑系科学専攻(複雑系計算論講座)教授
・研究室 webpage: http://ns1.ohka.cs.is.nagoya-u.ac.jp/